

On December 2nd, the National Institutes of Health announced that it will fund the development of three exciting new robots!
These robots, actually called co-robots, are designed to work cooperatively with people with disabilities and are part of the National Robotics Initiative. Funding for these NIH projects will total approximately $2.2 million over the next five years.
“When the general public thinks about the research that NIH supports, they don’t usually imagine robots. But robots have a tremendous potential to contribute to the health and well-being of our society, whether they are helping an elderly person engage in physical activity or promoting the curiosity of a child,” said Grace Peng, Ph.D., program director of Rehabilitation Engineering at the National Institute of Biomedical Imaging and Bio-engineering, part of NIH. “These three highly innovative projects demonstrate the power of encouraging leaders in the field of robotics to focus their attention on solving issues that pertain to health.”
What are these robotic projects?
1. The first one is a “smart-walker” to increase mobility.
The robot has two modes: smart power-assist walker and smart mule. In the smart power-assist walker mode, the user is situated within the robot and chooses the amount of powered assistance that is needed. In the smart mule mode, the robot walks alongside the user while carrying a load, for example groceries. The robot uses a 3-D computer vision-based sensing system to detect the user’s motion and the environment. With its smart legs, the robot is able to easily overcome environmental obstacles in ways that powered wheelchairs cannot.
2. The second project is a hand-worn device for individuals that are blind or have low vision.
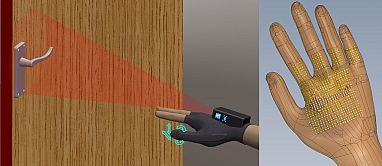
photo courtesy of: http://www.nih.gov/news-events/news-releases/nih-funds-development-robots-improve-health-quality-life
This project proposes to create a hand-worn assistive device that uses computer vision to identify target objects in a user’s environment, determine misalignment between the user’s hand and the object, and then convey — via natural human-device interfaces — the hand motion needed to grasp the object. The device will contribute to the independent lives of the visually impaired in two major ways: It will enhance the individual’s ability to travel independently by helping the user identify moveable obstacles and manipulate them so that they can pass, and it will assist in object grasping for non-navigational purposes such as identifying and correctly maneuvering a specific door handle.
3. The third project is a social robot companion for children.
The goal of this project is to create an autonomous, long-term social robotic companion for children that will promote and assess curiosity and a growth mindset through various interactions. After developing the robot, the researchers plan to evaluate its influence by conducting a six-month longitudinal study in which children learn and play while interacting with the robot companion.
Check out these new developments and read more about them by clicking here.
Have you seen or tried an assistive robotic device? Post your experience in the comment box below.


